孟庆虎教授揭秘:手术机器人与AI在医疗中的真实潜力
来源:CHTV百姓健康2025-09-16 18:21:53
人工智能正以前所未有的热度进入医疗领域,不少人认为“通用大模型”会成为智慧医疗的终极答案。但在2025服贸会期间,由北京陆士新医学基金会主办的“肿瘤治疗创新进展与药物研发新趋势论坛”上,南方科技大学电子与电气工程系系主任、加拿大工程院院士孟庆虎教授以“人工智能浪潮中的智慧医疗创新”为主题发表演讲,提出了另一种思路:真正能落地的智能,并不在于模型“大而全”,而在于能否深入理解和解决具体医疗场景中的问题。

孟庆虎教授
算力、算法与数据:
AI的“三重依赖”与局限
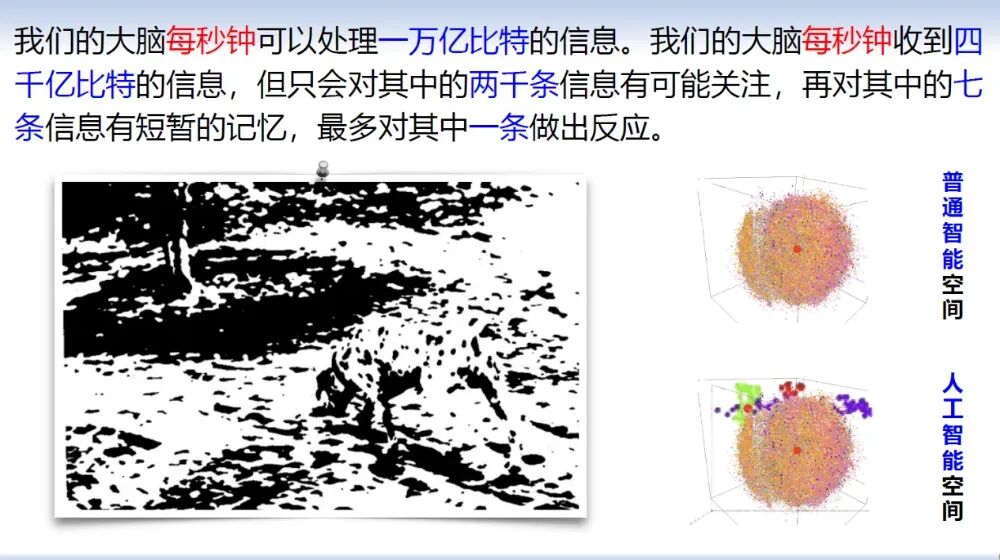
孟教授指出,AI高度依赖算力、算法和数据,但这种依赖也限制了它,使其仍是一种“低维智能”。
图源:孟庆虎教授演讲幻灯
从“表演”到“干活”:
手术机器人的落地挑战
图源:孟庆虎教授演讲幻灯
手术机器人领域类似。以达芬奇系统为例,二十年间五代产品迭代不大,第五代仅增加力传感,整体性能提升不到40%。国内跟随者多数陷入“模仿不超越”,缺乏创新。
外科医生的未来:
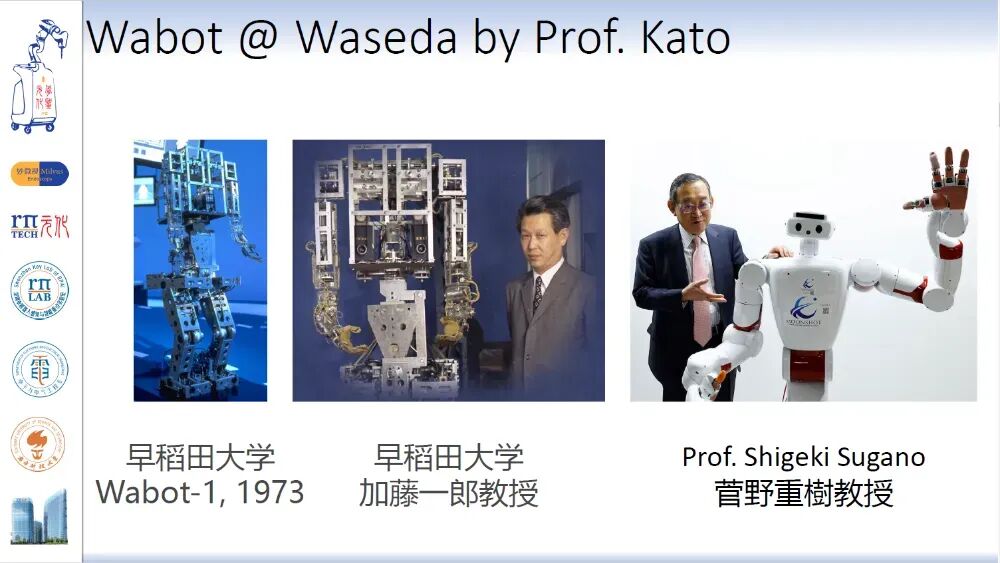
会被仿人机器人取代吗?
关于“仿人机器人是否会取代外科医生”,孟庆虎教授分享了两位权威学者的不同观点。
“手术机器人之父”Russell Taylor认为“不会”。他刚在《Science Robotics》上报道了全球首例全自主机器人胆囊切除术。认为手术机器人是专用设备,能自主完成手术,就不需要人形机器人介入。

图源:孟庆虎教授演讲幻灯
场景智能:
让AI真正落地医疗
针对通用AI局限,孟教授提出“场景智能”理念。他强调,“通用大模型只是一个极限值,永远不会真正到来”。更可行的方法是聚焦特定临床场景。
图源:孟庆虎教授演讲幻灯
结语:
理性与愿景中的智慧医疗
孟教授的报告为AI在医疗发展提供了清晰框架。他指出,AI仍受“低维困境”限制,仿生机器人和手术机器人面临技术瓶颈,而“场景智能”是一条切实可行的落地路径。
对于未来,孟教授建议,积极学习和使用AI工具,但应以场景智能为主,替代追求通用模型。仿生机器人医生终将出现,但需要5-15年的技术攻关和额外5-10年的成本控制。同时,应系统收集多模态临床数据,为智能系统提供高质量训练资源。
 CHTV 百姓健康微信
CHTV 百姓健康微信